Who We Are
Our Team
Sharp Face Robotics is a FIRST Tech Challenge team from Emerald High School in Dublin, California. We empower students to grow as engineers, leaders, and community builders — designing competitive robots while running STEM outreach programs that reach thousands across the Bay Area.
48
Club Members
2
Coaches
9,395
People Reached
2,026
Volunteer Hours
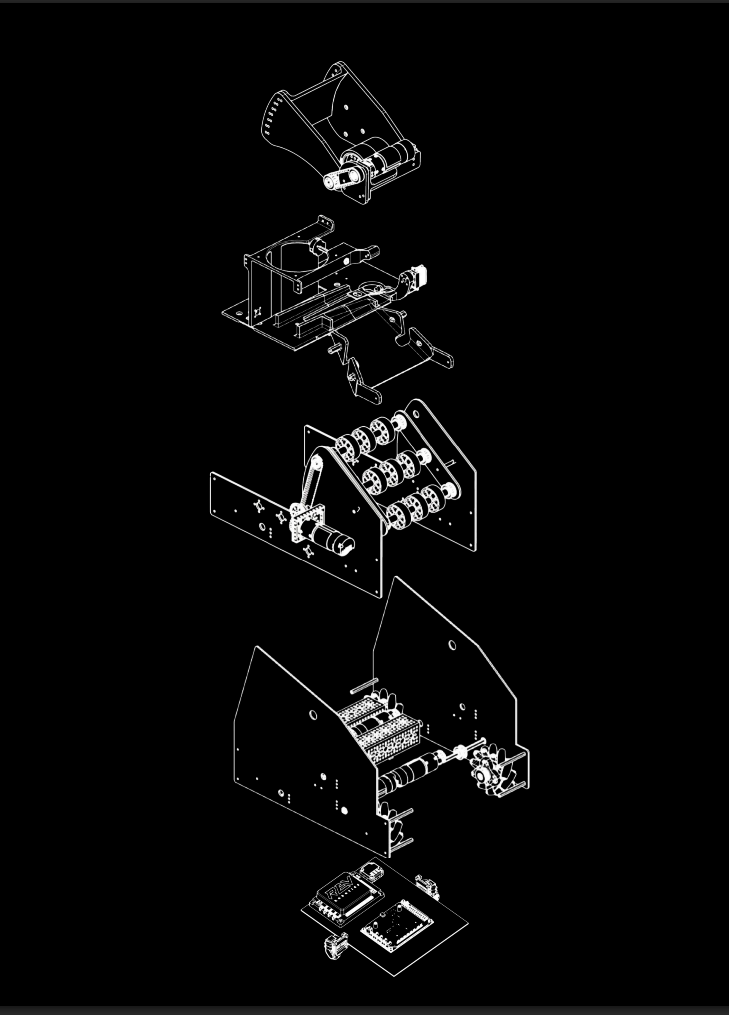
Design
Engineering Excellence
Custom mecanum drivetrain, dual-compliant intake, and an iterated flywheel shooter — built for reliability all season long.
Software
Smart Autonomy
Pedro Pathing, AprilTag vision, and voltage compensation — clean code that makes the robot feel effortless to drive.
Outreach
Community Presence
We have an active presence across the Bay Area. Contact us for curriculum development partnerships or any other inquiries — we'd love to connect.